工業技術研究院 資訊與通訊研究所 徐志偉 何凱云 趙永晟
前言
2015工研院資通所帶領國內智慧交通產業,鏈結美國汽車工程師協會(Society of Automotive Engineers, SAE)標準與台灣協同智慧運輸車聯網路側設施資通訊開放標準(Taiwan C-ITS Roadside Open Standards, TCROS),研發號誌時相推播技術;透過車聯網通訊技術,廣播十字路口紅綠燈之號誌時相資訊給自駕車或輕軌列車,可作為路口停等與車速調控之依據。目前號誌時相推播技術己在新北市淡海5G智慧交通試驗場域、新竹縣高鐵聯網自駕巴士接駁場域驗證,成效顯著。
精彩內容
1.簡介號誌時相與推播
2. 鏈結國內外技術標準
3.智慧交通場域驗證
4. 展望與推廣 |
簡介號誌時相與推播
號誌與行車交通息息相關,常見路口紅綠燈是由紅、黃、綠3種顏色燈號組成,週期(cycle)是當某一車流方向在某一顏色燈號開始到下次出現相同燈號所需之時間;時相(phase)是指綠燈時可以通行之車流方向,一個週期內可分為幾個時相,每一時相指派給一車流組合,而該車流組合在此時相中具有通過路口的權利。以二時相的十字路口為例,如圖1所示,時相一(東西向)行車時間50秒(綠燈45秒、黃燈3秒、全紅2秒)、時相二(南北向)行車時間50秒(綠燈45秒、黃燈3秒、全紅2秒),週期合計100秒,亦代表東西向與南北向的車輛通行秒數相同。
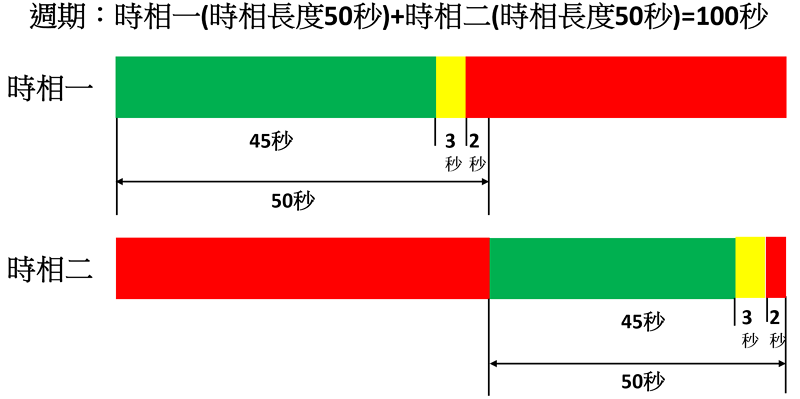
圖1 二時相十字路口號誌狀態示意圖
有效運用號誌時相可改善交通事故,近期行人於行穿線發生事故事件頻傳,造成國外對於台灣行人地獄的不良觀感,交通部於2023年5月全面推動「行人專用時相」和「行人早開時相」,該做法為短期內避開人車衝突最有效的方法。「行人專用時相」就是讓行人全部走完,車輛再行駛,設置在十字路口,各方向的行人綠燈會同時亮起,行車號誌則全為紅燈,達到人車分時分道;至於「行人早開時相」,則是行人綠燈提早幾秒亮起(一般為5至10秒),行車號誌再亮綠燈,以利行車轉彎時,能清楚看見已走在行人穿越線的行人,避免因視線死角造成事故。此外,推播則是運用無線通訊技術,將號誌時相資訊無線傳遞至行車電腦上,當駕駛者前方視線被大車遮蔽或距離過遠看不清號誌燈號時,仍可清楚知曉前方路口之號誌,做為行車加減速與煞車之參考。
鏈結國內外技術標準
1. 國內外號誌時相標準發展
因應國際5G通訊與車聯網技術的演進、鏈結國外號誌時相技術標準,2009年台灣所制定的都市交通控制通訊協定3.0版[1]不合時宜,勢必面臨改版,使其具有對外聯網通訊功能;分析改版項目共有三點,第一點為參考國際經驗、導入國際SAE J2735 [2]標準;第二點,針對4G/5G通訊技術不斷演進、短距無線通訊與車聯網應用多元,因此交通控制與通訊協定須相輔相成;第三點,配合智慧交通新應用(如號誌時相推播)的需求,使號誌控制器擴增既有格式內容。
為了迎合智慧交通的管理及應用層面,更為緊密地結合運作與相輔相乘,國內智慧交通產業聚焦國際標準SAE J2735 (該標準定義訊息集)內容,以擴充台灣都市交通控制協定,使號誌控制器能夠支援車聯網之路側單元 (RoadSide Unit, RSU)與車載單元(On-board Unit, OBU)之間的資訊內容。SAE J2735標準定義多種訊息格式,其中與號誌時相推播技術相關的訊息為號誌時相與秒數資訊(Signal Phase and Timing, SPaT)與車聯網地圖資訊(V2X Map Data, V2X MAP)。
SPaT訊息用於傳達一個或多個路口的號誌即時狀態。連同V2X MAP訊息接收,可用於判斷路口各方向的號誌狀態及下一個預期時相發生的時間。SPaT訊息用於發送目前每個時相的行進動向燈態(例如,通行方向燈態值與各燈態開始/最早開始時間,預計最有可能開始及最晚結束的時間值)。無運作的通行方向狀態通常不會傳輸,其通行方向可對應到指定的入向與離向連接的行進方向,並藉由SPaT與V2X MAP訊息中的互相對應及應用。
V2X MAP於SAE J2735文件中適用於傳達多種道路幾何資訊,V2X MAP主要的用途係透過單一個訊息內容,傳達一個或多個路口車道的幾何地圖。V2X MAP訊息內容可包括複雜路口描述、車道路段描述、高速轉彎半徑車道(用於彎道安全訊息),以及道路路段(部份交通安全應用)。單一V2X MAP訊息內容可用於傳達一個或多個幾何區域或路口描述。其內容亦可定義與其他訊息的關聯索引,可用於確認道路上特定位置的事件相關資訊。
台灣協同智慧運輸車聯網路側設施資通訊開放標準工作小組於 2021年訂定公告「號誌控制器與車聯網路側設施間資通訊標準 V1.0」,簡稱 TCROS V1.0 [3],其內容可因應我國2009年所制訂的「都市交通控制通訊協定 3.0 版」的應用架構,並可滿足 SAE J2735的國際標準通訊協定。目前發展現況為TCROS 2023 [4]完整繼承TCROS V1.0內容,並修訂自公告以來各界的調整意見,其標準包含號誌時相與秒數資訊與車聯網地圖資訊等協定內容,且依據SAE J2735所制訂定的欄位,在考量台灣及美國車流與道路型態差異的前提下,進行適應性調整。
2. 號誌時相推播運作
號誌時相推播技術首先需編碼與封裝號誌訊息,再經由車聯網通訊廣播給周遭行駛車輛,以下將分敘說明。
路側單元解譯完號誌控制器協定後,進行號誌訊息的編碼與封裝,在SPaT格式裡,會定義路段編號,不同的方向及不同的線道都由這個獨特的路段編號來區分,其中進入路口的稱為Ingress lane,離開路口的為Egress lane。而在V2X MAP封包中,也有跟SPaT封包對應的號誌編號供不同方向的來車使用的號誌資訊,如圖2所示。
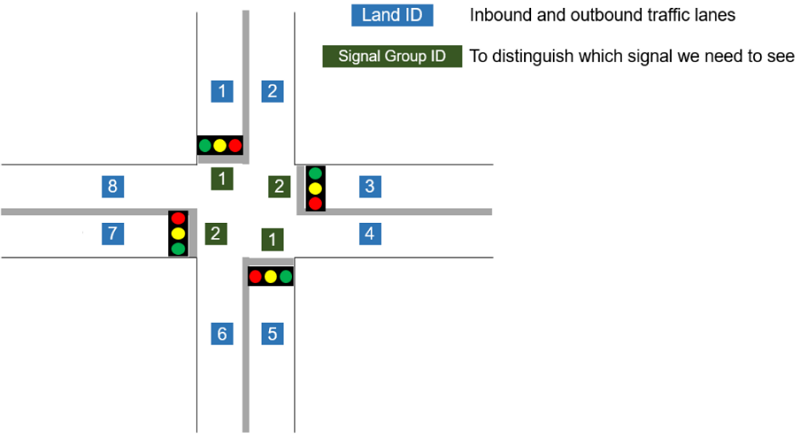
圖2 編碼號誌資訊於十字路口示意圖
封裝V2X MAP訊息的作用在於描述路口地理特徵等資訊,包含路口中心點經緯度以及停止線經緯度跟路段起點經緯度。在車載單元接收到此V2X MAP封包後,解譯計算各個線道的道路向量對應路段編號及此線道的起終點座標,而SPaT封包的作用在於描述場域路口狀態及各線道剩餘秒數資訊,包含各線道之時態起始與結束時間。在車載單元接收到SPaT封包後,取出對應MAP封包中的Signal Group ID,藉此了解各線道的時相狀態,車載單元藉此即可了解此組配對的SPaT/V2X MAP封包所描述的路口時相狀態跟剩餘秒數。
完成解譯與編碼號誌訊息後,透過無線通訊方式將封裝後的封包傳送給車載單元。回顧國際車聯網通訊技術可區分為兩大類,分別為專用短距離通訊DSRC (Dedicated Short-range Communications)與蜂巢式車聯網 C-V2X (Cellular Vehicle-to-Everything),DSRC通訊頻段為5.9GHz,反應時間為0.002sec,通訊距離為1公里,通訊技術由美國ASTM (American Society for Testing and Materials)於1992年主要針對電子道路收費 (Electronic Toll Collection, ETC)技術,採用915MHz頻段發展至今,已進入成熟期,通訊標準分美規IEEE 802.11p、IEEE 1609、歐規ETSI ITS、日規ARIB STD-T75,售後市場零組件供應商,採用如Autotalks、Qualcomm (2016年收購NXP)晶片的裝置。而C-V2X通訊技術,包含基於長期演進技術(Long Term Evolution, LTE)、5G新空中介面(New Radio, NR)以及未來6G V2X系統,支援兩種通訊介面,即蜂巢式通訊介面和直連通訊介面,目前全球的領先企業(英特爾、高通、易立信、諾基亞、華為、寶馬、戴姆勒和奧迪等)成立了5G汽車通訊技術聯盟(5G Automotive Association, 5GAA),共同推動5G工業標準的制定。車聯網通訊無論是DSRC與C-V2X,兩項標準相互融合是未來發展方向[5],因為各有其優劣勢之分,如在有網路、有基地台狀況下,採用C-V2X會更有效率,同時C-V2X具備技術前瞻性,有逐漸升級可能性。
相較於國際SAE J2735標準是RSU與OBU之間的應用層協定內容,TCROS標準則是為了調和國內交通號誌控制設備環境,應用範圍是OBU之外的其他車聯網設備角色,例如雷達或光達感測器。圖3為工研院資通所研發之號誌時相推播技術運作示意圖,其RSU兼具解譯都市交通控制通訊協定V3.0與TCROS 2023協定,並透過DSRC或C-V2X通訊技術推播SPaT/V2X MAP號誌資訊至OBU。圖4為號誌時相推播系統實際佈建示意圖,RSU與號誌控制器透過實體線路連結,並附掛於既有號誌桿上,透過車聯網通訊方式傳送號誌資訊至OBU。
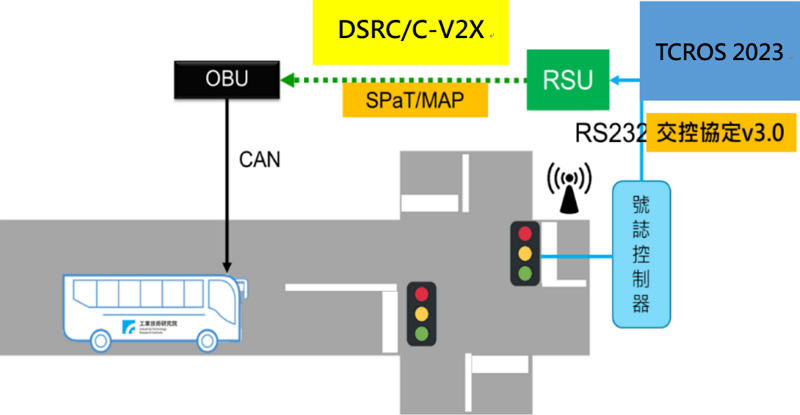
圖3 號誌時相推播技術運作示意圖

圖4 號誌時相推播系統實際佈建示意圖
智慧交通驗證場域
號誌時相推播技術已實際運行於台灣兩個場域,分別為新北市淡海5G智慧交通試驗場域與新竹縣高鐵聯網自駕巴士接駁場域。在新北市淡海新市鎮佈建新世代路側及感測設備,並結合車聯網技術提供智慧號控、邊緣交通資訊蒐集運算系統等基礎設施,以提供感測器整合車聯網交通安全應用,透過實測驗證號誌時相推播的通訊效能,測試規格如表1所示,測試方法為一開始將測試用設備(RSU及OBU)靜止放置在相距700公尺距離處,如圖5所示,接收端OBU(黃色圓點)與發送端RSU(紅色方體)分別開啟通訊效能測試程式,OBU從最遠約716公尺遠處,以20 km/h速度直線駛向RSU位置,計算動態行駛下,不同距離之封包遺失率,如表2所示,相距不同位置時,封包接收率均達到90%以上,符合車聯網通訊效能標準。
表1 智慧號誌時相推播技術測試規格說明
| 測試規格 |
數值 |
| TX power |
20dBm |
| Packet Size |
100Bytes |
| Frequency |
20Hz |
| Duration |
約140sec |
| Device |
Num 2 |

圖5 接收端OBU(黃色圓點)駛向發送端RSU(紅色方體),其通訊效能測試
表2 RSU與OBU相距不同位置時,封包成功接收率統計表
| 距離(公尺) 接收率(%) |
接收率(%) |
| <100 |
98.9 |
| 100~200 |
98.31 |
| 200~300 |
98.6 |
| 300~400 |
99.16 |
| 400~500 |
97.57 |
| >500 |
94.74 |
第二個試驗場域為新竹縣高鐵聯網自駕巴士接駁路線,該路線運用車聯網技術導入自駕巴士,提供路口號誌連動車速控制與路口防碰撞警示。場域測試為路側通訊設備與號誌控制器可透過交控協定V3.0做通訊與訊息解析,並透過路側通訊設備傳送國際標準所制定的號誌時相SPaT/MAP訊息至自駕巴士的車載機做訊息接收與解析。
除了車載通訊設備上確認接收號誌資訊,亦可透過自駕車之車內螢幕檢視號誌時相與秒數資訊,如圖6右上角所示為透過車內螢幕顯示直行/右轉綠燈與秒數(22秒),自駕巴士可依據該資訊做車速調整與紅綠燈停等的動作。

圖6 自駕巴士車內顯示路口號誌燈態為綠燈與秒數
展望與推廣
有鑑於車聯網產業蓬勃發展,工研院資通所持續與交通部、台灣車聯網產業協會共同推動車聯網路側設施資通訊標準制定,擴增TCROS標準內容與擘劃5G智慧城市新紀元。工研院資通所的號誌時相推播技術已技轉晶片商、工業電腦製造商、電子地圖製作及交通控制系統開發商與工程顧問公司,並實際運行在淡海5G智慧交通試驗場域與新竹高鐵自駕巴士接駁場域。展望未來推動策略,持續於2023~2025年與公協會合作,進行「號誌控制器與車聯網路側設施間資通訊標準」制定及驗證相關工作,透過合作整合號誌控制器與車聯網路側設施間之資通訊標準,更將藉導入國際認證驗證機制與流程,以加速鏈結國際趨勢,導入與推廣技術與帶動國內產業發展。